CUHK and HKU jointly develop a potential new treatment for brain tumours and Parkinson’s disease
A joint multi-disciplinary team from The Chinese University of Hong Kong (CUHK)’s Faculty of Medicine (CU Medicine) and The University of Hong Kong (HKU)’s Department of Mechanical Engineering has developed an interactive, multi-stage robotic positioner for stereotactic neurosurgery, guided by intra-operative magnetic resonance imaging (MRI).
Through close collaboration between clinicians and engineers, the team proposed an interactive, multi-stage robotic positioner for cannula or needle instruments used in stereotactic neurosurgery, with the goal of providing more accurate and effective treatment of many neurological diseases, such as brain tumours and Parkinson’s disease. The system was validated through cadaver studies and skull model testing. Initial results have laid a solid foundation for future studies that could lead towards clinical applications, and have been published in leading international journal Advanced Science.
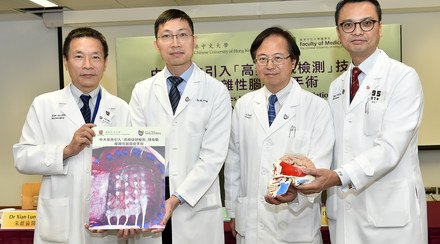
A joint multi-disciplinary team from CUHK and HKU has developed an interactive, multi-stage robotic positioner for stereotactic neurosurgery, guided by intra-operative magnetic resonance imaging (MRI). The robotic positioner is for cannula or needle instruments used in stereotactic neurosurgery, with the goal of providing more accurate and effective treatment of many neurological diseases, such as brain tumours and Parkinson’s disease.
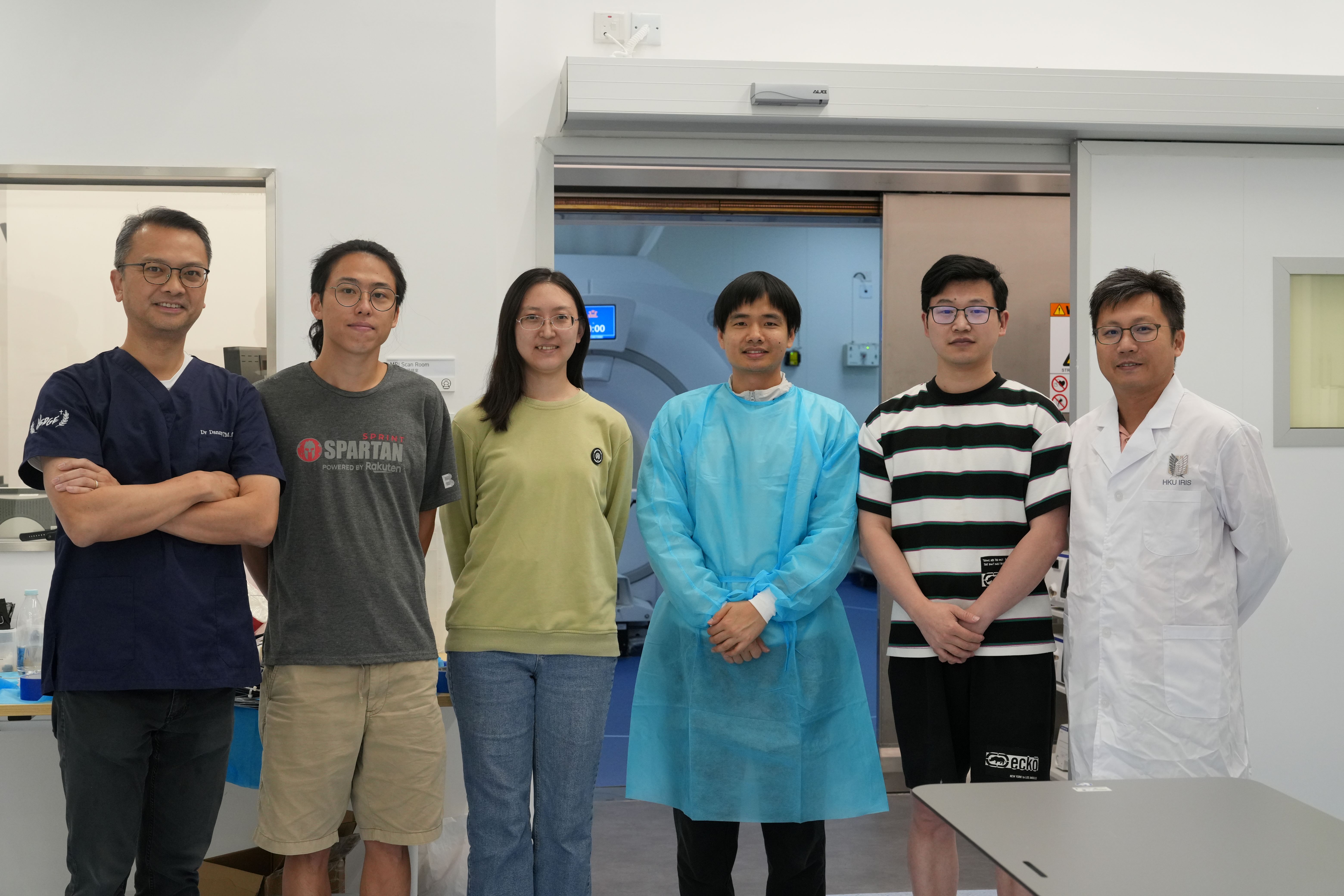
Featured in the photo are Dr Danny Chan (first from left), Clinical Associate Professor (honorary) and Head, Division of Neurosurgery, Department of Surgery, CU Medicine; Professor Kwok Ka-wai (first from right), Associate Professor, Department of Mechanical Engineering, Faculty of Engineering at HKU; and members from the research team.
The robot is lightweight and compact, allowing manual manipulation with soft robotic fine adjustment
The team has proposed that the robotic positioner can assist surgeons in performing intra-operative MRI-guided stereotactic neurosurgery, in particular interventions that involve cannula or needle targeting, such as biopsy, injection, ablation, catheter placement and deep brain stimulation (DBS).
The robot is lightweight, at 203g, and compact, with a diameter of 97mm and a height of 81mm, allowing its skull-mounted structure to fit within most standard imaging head coils. The system is used in two stages:
Stage 1: manual coarse adjustment performed interactively by the surgeon
Initially, the surgeon orients the robot instrument guide towards the direction of the planned trajectory, based on pre-operative images. In-built fibre-optic lighting of the system intuitively indicates the angulation error with reference to the planned trajectory. Once the surgeon has oriented the instrument guide close to the planned trajectory with an error of less than five degrees, the system is remotely locked.
Stage 2: automatic fine adjustment with precise, responsive, high-resolution soft robotic positioning
The system then automatically positions the instrument guide on the planned trajectory. Making use of finite element analysis (FEA)-based design and optimisation of the fluid-driven soft actuator architecture, the instrument can be positioned accurately, with an orientation error of less than 0.2 degrees.
Professor Kwok Ka-wai, Associate Professor, Department of Mechanical Engineering, Faculty of Engineering at HKU, said, “Across the stages, the system achieves robust orientation locking through soft robotic mechanisms like tendon-driven braking units and granular jamming. It sets the instrument insertion depth with the assistance of a stopper. The surgeon then manually inserts the instrument via the robot instrument guide for biopsy, injection and other interventions. A subsequent MRI can monitor the procedure.”
To allow the system to target accurately, the team has developed custom-made miniature wireless omni-directional tracking markers that facilitate robot registration under MRI. The entire system is fabricated with MR-safe materials, generating zero electromagnetic interference, and allowing the use of intra-op MRI guidance during robot actuation and to evaluate the interventional process.
Dr Danny Chan Tat-ming, Clinical Associate Professor (honorary) and Head, Division of Neurosurgery, Department of Surgery, CU Medicine, stated, “The system caneliminate the intrinsic errors in conventional frame-based stereotaxis, such as frame-precision, image fusion discrepancy and measurement errors. As a result, insertion precision will increase, securing surgical outcomes. The shorter operation time will help to improve patient comfort and satisfaction. This interactive, multi- stage robotic positioner is ready to be tested for clinical translation. ”The first intraoperative MRI (iMRI) system in Hong Kong will come into service in the third quarter of 2024. Two to three more iMRI systems will be set up in Hong Kong in the coming five years."
Appendix
More about the collaboration
Other collaborators in this project include clinical and engineering experts from Prince of Wales Hospital (PWH), CUHK’s Department of Biomedical Engineering, University College London (UCL), and Johns Hopkins University (JHU). This project is also supported by the Multi-scale Medical Robotics Center (MRC) during the system’s pre-clinical trials. Making use of the MRI scanning facilities in the MRC, the proposed system has gone through skull model and cadaver trials to validate its clinical workflow and feasibility in human anatomy. The results showed the robot’s precision to be at the level where errors are less than 3mm. The prototype is IP-protected, with a patent pending.
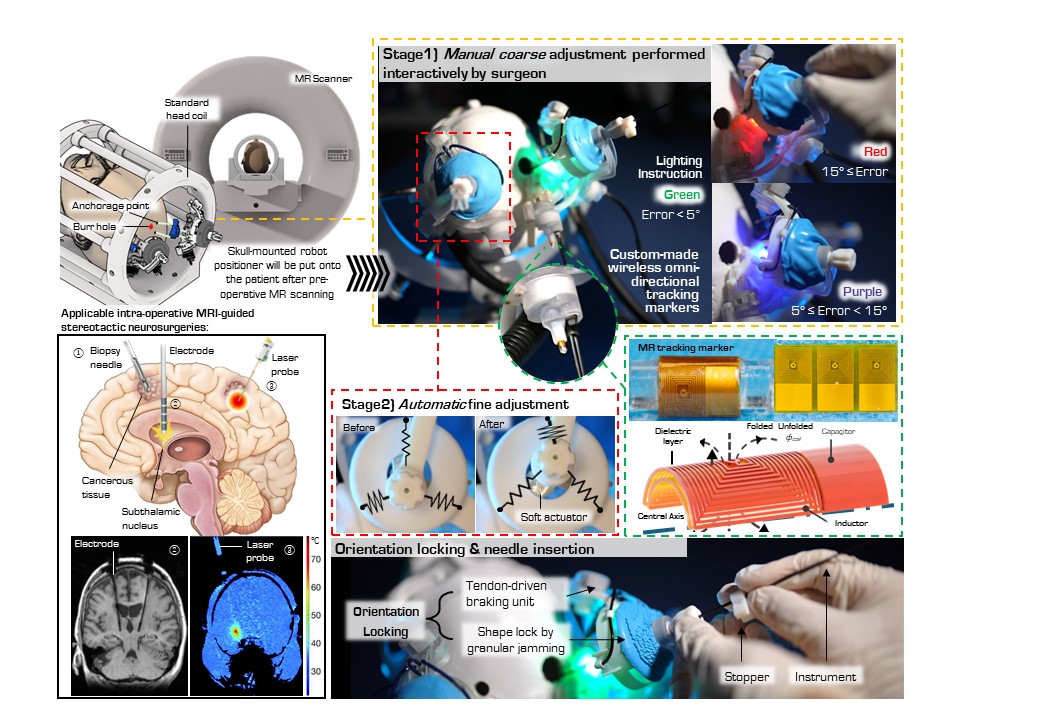
A graph to show the workflow of the interactive multi-stage robotic positioner.